苏超现场10岁女孩举手敬礼唱国歌 纯真爱国情
创始人2026-07-05 11:17:58
7月4日晚,“苏超”联赛无锡队对阵宿迁队的比赛在江阴市体育中心激情上演。当国歌奏响,全场起立,一个稚嫩的身影格外引人注目——来自无锡市新吴区的10岁小女孩程熙越,面向国旗挺直身板,高高举起右手敬礼,神情专注而庄重
7月4日晚,“苏超”联赛无锡队对阵宿迁队的比赛在江阴市体育中心激情上演。当国歌奏响,全场起立,一个稚嫩的身影格外引人注目——来自无锡市新吴区的10岁小女孩程熙越,面向国旗挺直身板,高高举起右手敬礼,神情专注而庄重。
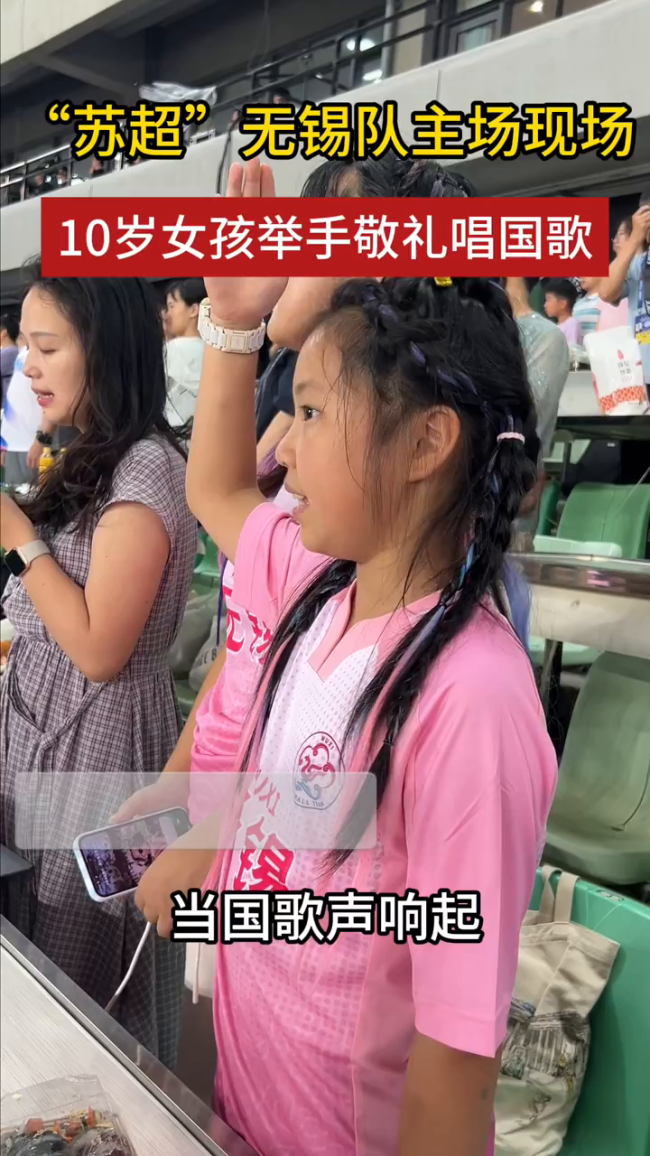
她表示,国歌响起时心里特别自豪,情不自禁地跟着敬礼了。程熙越和妈妈开车一个多小时专程赶来,这是她第一次到现场看球赛。“队员们在场上拼搏的精神,特别值得我学习。”她的话语中透着对足球最纯真的热爱。
所有文章未经授权禁止转载、摘编、复制或建立镜像,违规转载法律必究。
举报邮箱:1002263188@qq.com